Although you are probably not aware of them, dozens of electronic control units (ECUs) — printed circuit boards (PCBs) in metal or plastic housings — exist in your car to control and monitor the operation and safety of your vehicle’s many control systems. These units must work for the lifetime of your car, during which time they are subjected to many heating and cooling cycles. The most obvious cycle occurs when you start your car after it has cooled at night. It heats up as the car runs and then cools again when you shut it off. That’s one “ambient” temperature cycle.
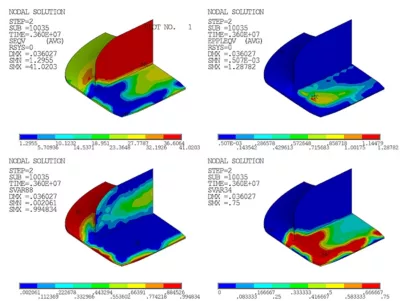
Additional so called “active” thermal cycles can occur locally within specific electronic components on the PCB. For instance, a MOSFET transistor draws a lot of current and heats up the PCB near its location, causing additional thermal cycling. These complex temperature distributions can cause local thermomechanical strain because differences in temperature across the PCB result in differential expansion of the board. Because the board is constrained by its housing, this can lead to bending of the board, putting additional strain on the solder joints that connect the components to the board.
The widely used power law based approach — simulation of only few cycles and prognosis of solder joints lifetime — has many shortcomings, where no absolute lifetime prediction or the damage driven load relocation and its nonlinear evolution are captured. Youssef Maniar and Marta Kuczynska, engineers at Robert Bosch GmbH in Germany, have developed an accurate nonlinear damage model able to predict absolute lifetime of solder connections. The problem they faced, absolute lifetime prediction, involves simulation of all cycles imposed to the components, and the computational effort is therefore extensive. Then, about two years ago, they read an academic paper that described a way to “jump” over some cycles to accelerate simulation.
The mathematics behind the ability to jump over a large number of simulated thermomechanical cycles to dramatically accelerate the simulation time without sacrificing accuracy is involved, but the software essentially looks at the slope or “gradient” of certain solution variables (e.g., stress) versus time plot on the fly to determine when it can skip over the next n number of cycles. The maximum value of n must be defined by the simulation engineer before the run. The simulation engineer also inputs other parameters beforehand to impose limits on the software to optimize the run.